Evolving Hyperparameter Genomes in Foraging and Learning Agents
A recurring question in evolutionary computation and agent-based modeling is simple: how much adaptive behavior can emerge under ecological constraints like finite resources and costly reproduction, without a hand-crafted fitness function or a predefined optimum to chase? This experiment is a small step toward answering that: each agent carries its own hyperparameter chromosome, offspring inherit it (with optional mutation and crossover), and selection is whatever the resource environment happens to apply.
This isn’t meant as a claim of open-ended evolution - it’s a bounded simulation in which evolutionary dynamics are layered on top of reinforcement learning agents that have to feed themselves to stay alive.
What’s evolving
Each agent owns a HyperparameterChromosome built from its decision config at
construction time. The schema (documented in
Hyperparameter Chromosome Design)
is currently two logical chromosomes that are crossed and mutated as a single
gene vector:
Chromosome A - learning / RL hyperparameters. Knobs that shape how the agent learns during its lifetime:
Chromosome B - action-policy priors. Knobs that shape what the agent is biased toward doing before learning kicks in:
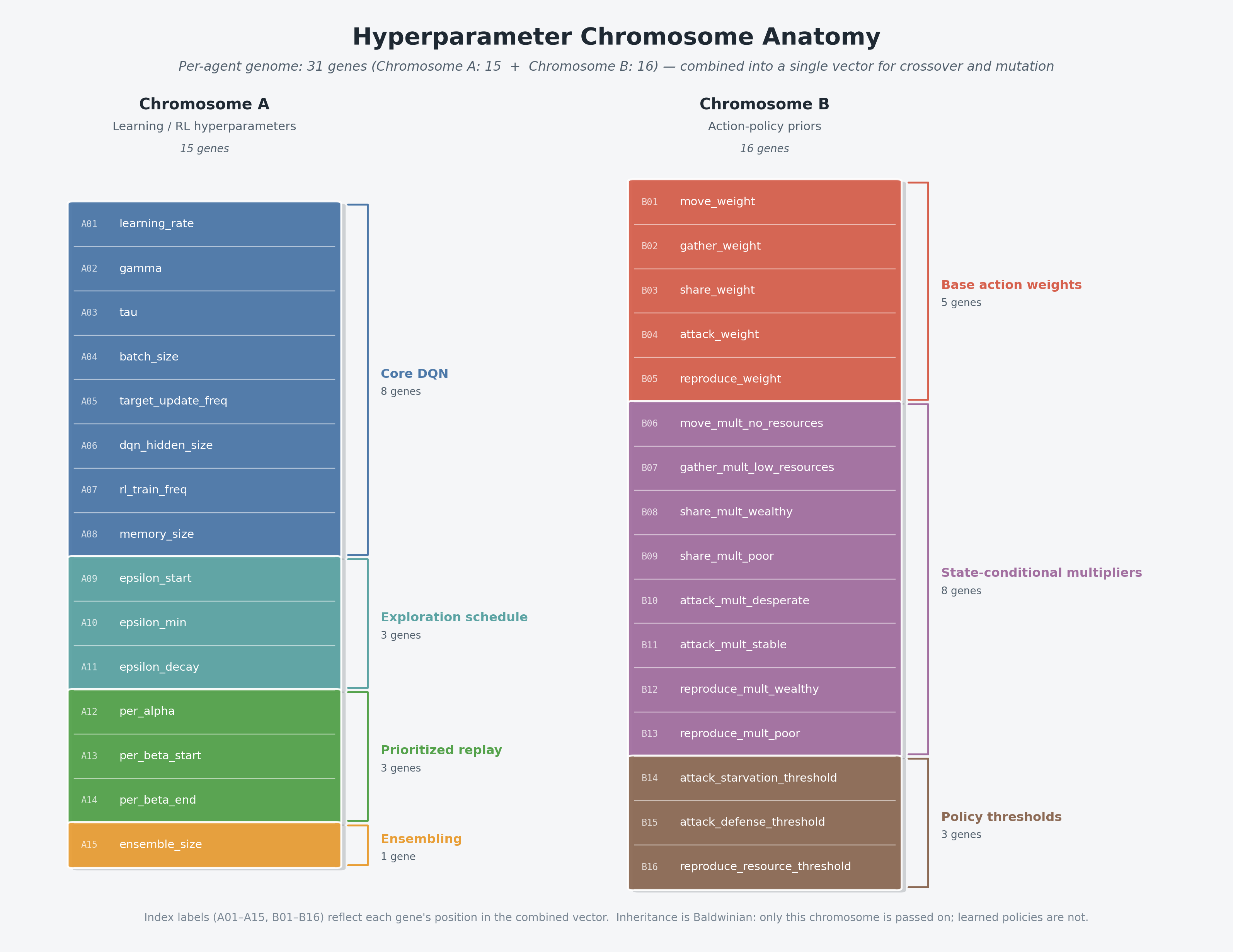
Integer-valued genes (memory_size, batch_size, target_update_freq,
dqn_hidden_size, rl_train_freq, ensemble_size) are stored as real values
on the chromosome and rounded with a bounds check when projected back into the
decision config.
None of these genes directly encode behavior. Chromosome A shapes the learning dynamics, Chromosome B shapes the prior over action choice; the learned policy itself is not part of the genome.
Inheritance, mutation, and crossover
When an agent reproduces, the child’s chromosome is derived from the parent’s:
- Default path: asexual - deep-copy the parent chromosome and apply per-gene mutation.
- Crossover enabled: sexual - pick a co-parent, combine the two
chromosomes (
SINGLE_POINT,UNIFORM,BLEND, orMULTI_POINT), then mutate.
The resulting chromosome is written back into the child’s decision config
before its DecisionModule is constructed, so the offspring starts life with
the inherited learning priors already baked in.
Selection through ecology, not a fitness function
There is no explicit selection operator in the simulation loop. Selection is emergent and ecological:
- Finite resources. Resource nodes deplete as agents gather from them.
- Metabolic cost. Every step debits a base consumption rate from the agent’s resource pool.
- Starvation. After a configurable number of zero-resource steps, the agent terminates.
- Costly reproduction. Reproduction requires meeting an offspring-cost threshold, which is paid out of the parent’s resources.
Lineages whose hyperparameters happen to produce agents that forage well enough to cover both metabolism and reproduction persist. Lineages that don’t, die out. That’s the whole selection story.
Foraging
Agents have an explicit gather action: locate the nearest resource node
within range via the
spatial index, consume from it, and credit
the agent’s resource pool. Foraging is one of the actions the RL policy
chooses among, so the evolved learning hyperparameters and the foraging
behavior are coupled through the decision module.
The GIF above is a 50x50 world rendered from a sample run; you can regenerate
it (or render any other simulation) with
scripts/make_foraging_gif.py:
python scripts/make_foraging_gif.py \
--db-path docs/sample/simulation.db \
--output docs/research/devlog/figures/foraging-grid.gif \
--max-steps 1000 --step-stride 6 --fps 12
Learning during life - Baldwinian, not Lamarckian
Within an agent’s lifetime, a DecisionModule driven by RL updates from
experience. At reproduction time, however, only the hyperparameter
chromosome is passed on; the offspring builds a fresh decision module. No
Q-values, weights, or replay buffers cross the generational boundary.
That makes the system Baldwinian: evolution tunes the priors and learning dynamics (how fast to learn, how much to discount the future, how aggressively to explore), and each generation has to acquire its own experience inside those priors.
Scope and limits of this experiment
It is:
- A per-agent hyperparameter genome with mutation and optional crossover.
- An ecological selection regime driven by resource scarcity and reproduction costs.
- RL agents whose learning hyperparameters are themselves under selection.
It isn’t (yet):
- Open-ended evolution in the ALife sense - runs are bounded simulations.
- A genome that encodes full behavior or network architecture - only a
narrow set of hyperparameters evolve through this path. - Lamarckian inheritance is not the baseline - offspring policies remain
cold-start by default. (An opt-in
lamarckianmode that warm-starts offspring policy weights was since added under #849, but it is not the default and showed no robust fitness gain; see the Baldwinian vs Lamarckian A/B.)
Current state and next questions
Current capabilities in this line of work:
- The intrinsic runner supports explicit initial-conditions profiles, selection-pressure controls, and per-step telemetry, so ecology can be varied systematically instead of ad hoc.
- Speciation and lineage tracking are part of the standard analysis outputs, including snapshot-based cluster traces and lineage-tree analysis.
- Cross-run profile comparisons (for example, conservative/balanced/buffered resource buffers) are part of the workflow, not one-off side analysis.
- The chromosome/reproduction path is documented and parameterized in the Intrinsic evolution docs and Hyperparameter chromosome design.
Open questions and next targets:
Run broader multi-seed cohorts per profile and treat trends as distributions, not single trajectories.Done (2026-05-12): a 6-seed × 3-profile sweep (scripts/run_stable_profile_seed_sweep.py+scripts/analyze_stable_profile_seed_sweep.py, PR #863) now aggregates per-profile distributions with mean/variance/95% CI and a robust-vs-seed-sensitive classification. See When one seed disagrees with six.- Push farther on inherited payload design (policy priors/module state) to test when richer inheritance helps versus overfits to local ecology. Re-derived from first principles (2026-06-15): since the full-policy warm-start (#849) turned out to be a fitness null and within-life learning is near-null at the default horizon (#878), the payload plan is no longer “copy more of the network.” See Inherited payload design for the weights-plus-continuation-machinery variant ladder (P0–P4) and the signal-budget precondition.
- Add explicit Baldwinian-vs-Lamarckian A/B runs under matched settings to quantify when warm-starting offspring is worth the stability trade-off.
The practical focus is no longer whether the mechanism exists, but which inheritance/ecology combinations produce robust gains across runs.